Speeding detection¶
The Use Case detects vehicles and calculates their speed by measuring the time it takes for them to travel a specified distance between two lines drawn on the video frame. The real-world distance between these lines must be set manually.
Real-world distance
The real-world distance between the two lines is used to calculate the speed of vehicles. This distance is set manually during configuration and should be based on the actual distance between the two lines.
Prerequisites¶
- A video with a fixed view.
- Knowledge of the real-world distance of a location seen on the video frame.
PTZ cameras are only supported if they are set to a fixed position, as the query requires drawing lines on the video frame.
-
Go to Video Search Advanced Search to set up a Search for speeding vehicles.
-
Go to Live Rules New Rule to set up a real-time detection of speeding vehicles with alarm integration.
Select Source¶
Select the video you want to run the Search on from the left sidebar. The thumbnail image of the chosen video is displayed here.
Time interval Advanced Search only¶
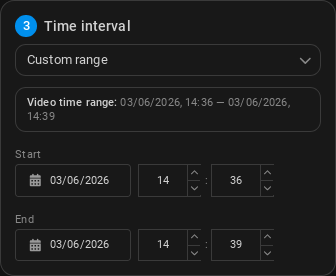
Select a time frame for the analytics to run.
- Entire video: Run the Search on the entire video duration, from the start timestamp to the end timestamp (set during video registration).
- Custom range: You can select a custom start and end date and time to run the Search on. Type the desired date and time or select them by clicking the calendar icon.
Object Filter¶
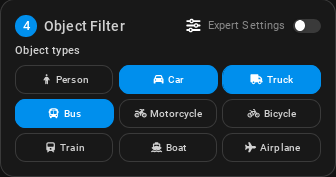
Select one or multiple object types you want to search for.
-
Sensitivity (Medium by default): The sensitivity level of the Search. The higher the sensitivity, the more likely it is to detect speeding vehicles, but it may also result in more false positives.
-
Personalized AI: Some object types may have additional attributes available for filtering, such as color and type for Vehicle objects. You can select any number of them to further filter your results; For instance, adding the red attribute to Vehicle objects will filter detections so that only red vehicles will show up in the Search results.
Expert Settings
Ticking the Expert Settings box will open additional configuration options for the Search, such as more object types to choose from. Additional parameters:
-
Minimum height (in pixels, 25 by default) : The minimum height of the bounding boxes of the detected objects. Adjusting these values can help filter out irrelevant results based on the size of the detected objects.
-
Combination mode: Select whether the Search will return results that match all or any of the attributes chosen above.
Speed calculation¶
-
Line definition: Draw two lines on the canvas to define the area where vehicles will be detected for speed calculation. The lines should be drawn parallel to each other and perpendicular to the direction of traffic flow. Left-click on the video frame to draw the first line, then click Line 2 left-click to draw the second line.
-
Distance (in meters, 32 by default): The real-world distance between the two lines drawn above.
-
Speed limit (in km/h, 50 by default): The speed limit for vehicles. If a vehicle exceeds this speed limit, a detection will be triggered.
Alarm integration Live Rules only¶
You can choose to integrate the Search with an alarm system.; whenever a stopped object is detected, an alarm will be triggered in the integrated system.
-
Alarm cooldown: (in seconds, 10 by default) The minimum amount of time that must pass between two detections before an alarm can be triggered again.
-
Alarm integration: Choose from the list of available integrations. The following integrations are available to be created in Integrations:
Results
All done - Clicking Search will immediately start the analysis and opens the Search Results screen.
Live Rules will produce real-time detections , and the results will be displayed in the Alarms screen. If an alarm integration is set up, an alarm will also be triggered in the integrated system.